
创造、创新、创业
Creation, innovation and Entrepreneurship
冯朝
分类:院内新闻 作者: 来源: 时间:2023-03-10 访问量:
一、个人基本信息
姓名:冯朝
职称:副研究员、硕士生导师
电子邮箱:fengzhao@whu.edu.cn, mefengzhao@163.com
联系方式:18707192582
办公地址:武汉大学动力与机械学院九教A9515
二、教育及工作经历
2022.11~今:武汉大学,动力与机械学院,机械工程系,副研究员
2020.10~2022.10:University of Macau, Faculty of Science and Technology,UM Macao Postdoctoral Associateship (UMPA) Research Fellow
2014.09~2020.06:武汉大学,动力与机械学院,机械电子工程(直接攻博),工学博士
2019.01~2020.03,National University of Singapore (NUS),Department of Electrical and Computer Engineering (ECE),国家留学基金委(CSC)联合培养博士生
2010.09~2014.06:武汉大学,动力与机械学院,机械设计制造及其自动化,工学学士
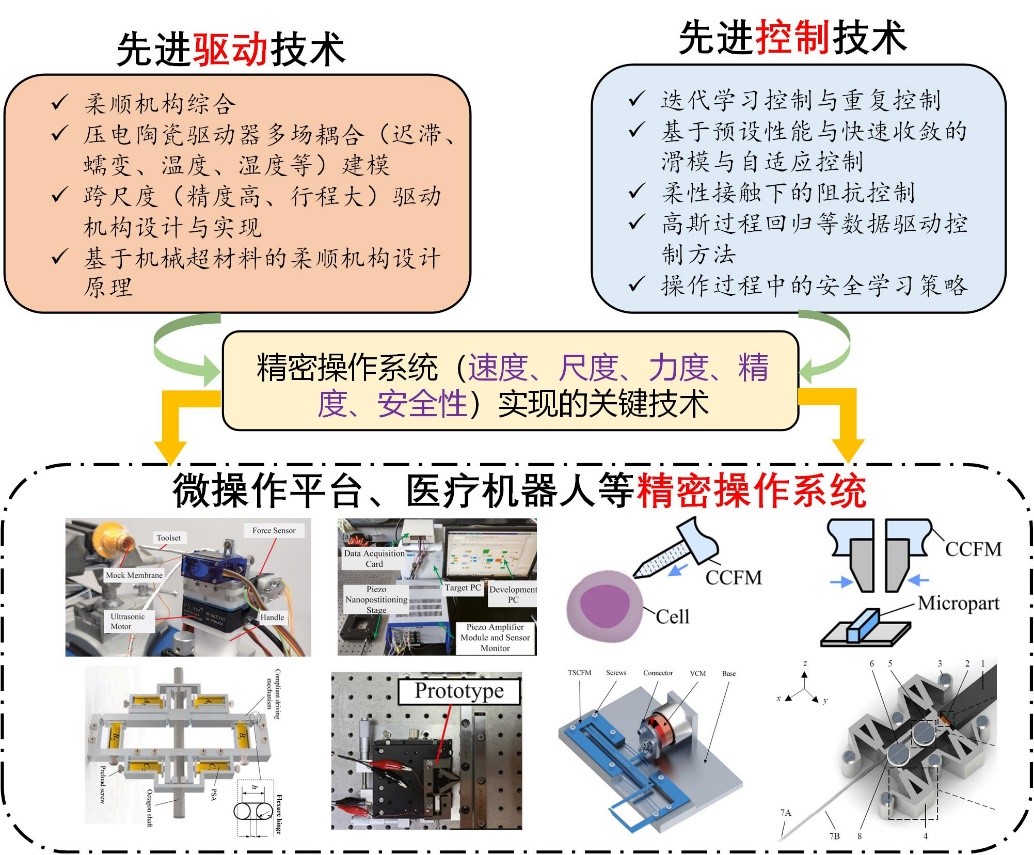
三、研究领域
精密驱动与控制、柔顺机构综合、微操作机器人、医疗机器人。欢迎具有机器人、机械工程、自动化背景的同学加入。
四、荣誉和奖励
[1] (2024.08) International Conference on Advanced Robotics and Mechatronics (ICARM 2024) Section Chair
[2] (2024.01) 武汉大学2023年中国研究生创新实践系列大赛优秀指导老师
[3] (2023.08)“申昊杯”第五届中国研究生机器人创新设计大赛优秀指导老师
[4] (2023.07) International Conference on Advanced Robotics and Mechatronics (ICARM 2023)最佳会议论文提名奖
[5] (2023.06) 武汉大学2023届优秀学士论文指导老师
[6] (2020.12) 武汉大学研究生学术创新奖二等奖
[7] (2020.10) 澳大濠江博士后UM Macao Postdoctoral Associateship
[8] (2020.06) 武汉大学优秀毕业研究生
[9] (2018.07) International Conference on Advanced Robotics and Mechatronics (ICARM 2018)最佳会议论文提名奖
[10] (2018.06) 国家建设高水平大学公派研究生项目奖学金
[11] (2016.08) International Conference on Intelligent Robotics and Applications (ICIRA 2016)最佳学生论文奖
五、代表性论文
长期从事医疗机器人、微操作机器人系统设计及其精密运动控制研究,在IEEE/ASME Transactions on Mechatronics、Mechanical Systems and Signal Processing、IEEE Robotics and Automation Letters等SCI/EI检索期刊/会议发表论文50余篇(其中第一/通讯/共同通讯作者20余篇),在跨尺度压电精密驱动、柔顺机构设计、非线性建模、智能控制、人机交互等方面建立了深厚的理论基础。学术成果详见个人主页:https://mefengzhao.github.io/
近期代表作:
[1] Li, Y., Ye, T., Ling, J., Xiao, X., & Feng, Z. * (2024). A novel F-shaped linear guiding mechanism based compliant positioning stage with restricted parasitic motion. Precision Engineering, 88, 674-685. (中科院2区, IF=3.5)
[2] Zuo, C., Feng, Z, * & Xiao, X.* (2024). CCMD-SLAM: Communication-Efficient Centralized Multi-Robot Dense SLAM with Real-Time Point Cloud Maintenance. IEEE Transactions on Instrumentation and Measurement. 73, 7504812. (中科院2区Top, IF=5.6)
[3] Zuo, C., Feng, Z.*, & Xiao, X.* (2024). CMDS-SLAM: real-time efficient centralized multi-robot dense surfel SLAM. Measurement Science and Technology, 35(11), 116303. (中科院3区, IF=2.7)
[4] Zhang, H., Zhang, X.H., Feng, Z.*, & Xiao, X.H* (2024). Heterogeneous Multi-Robot Cooperation with Asynchronous Multi-Agent Reinforcement Learning. IEEE Robotics and Automation Letters, 9(1), 159-166. (中科院2区, IF=4.6)
[5] Feng, Z., Liang, W.Y., Ling, J., Xiao, X.H., Tan, K.K., & Lee, T.H. (2022). Precision Force Tracking Control of a Surgical Device Interacting with a Deformable Membrane. IEEE/ASME Transactions on Mechatronics, 27(6), 5327 - 5338. (中科院1区Top, IF=5.6)
[6] Feng, Z., Liang, W.Y., Ling, J., Xiao, X.H., Tan, K.K.,& Lee, T.H. (2022). Adaptive Robust Impedance Control for an Ear Surgical Device with Soft Interaction. IEEE/ASME Transactions on Mechatronics, 27(3), 1784-1795. (中科院1区Top, IF=5.6)
[7] Feng, Z., Ming, M., Ling, J., Xiao, X.H., Yang, Z. X., & Wan, F. (2022). Fractional Delay Filter based Repetitive Control for Precision Tracking: Design and Application to a Piezoelectric Nanopositioning Stage. Mechanical Systems and Signal Processing, 164, 108249. (中科院1区Top, IF=7.9)
[8] Feng, Z., Liang, W.Y., Ling, J., Xiao, X.H., Tan, K.K., & Lee, T.H. (2020). Integral Terminal Sliding Mode based Adaptive Integral Backstepping Control for Precision Motion of a Piezoelectric Ultrasonic Motor. Mechanical Systems and Signal Processing, 144, 106856. (中科院1区Top, IF=7.9)
[9] Feng, Z., Ling, J.,Ming, M., Liang, W.Y., Tan, K.K., & Xiao, X.H. (2020). Signal-transformation-based Repetitive Control of Spiral Trajectory for Piezoelectric Nanopositioning Stages, IEEE/ASME Transactions on Mechatronics, 25(3), 1634-1645. (中科院1区Top, IF=5.6)
其他代表作:
[1] Yang, S., Gao, X., Feng, Z.*, & Xiao, X.H* (2023). Learning Pose Dynamical System for Contact Tasks under Human Interaction. Actuators (Vol. 12, No. 4, p. 179).
[2] Duan, Y., Ling, J., Feng, Z., Ye, T., Sun, T., & Zhu, Y. (2024). A Survey of Needle Steering Approaches in Minimally Invasive Surgery. Annals of Biomedical Engineering, 52(6), 1492-1517.
[3] Feng, Z., Ling, J., Ming, M., & Xiao, X.H. (2019). Integrated Modified Repetitive Control with Disturbance Observer of Piezoelectric Nanopositioning Stages for High-speed and Precision Motion. Journal of Dynamic Systems, Measurement, and Control, 141(8), 081006.
[4] Feng, Z., Ling, J., Ming, M., & Xiao, X.H. (2018). A Model-data Integrated Iterative Learning Controller for Flexible Tracking with Application to a Piezo Nanopositioner. Transactions of the Institute of Measurement and Control, 40(10), 3201-3210.
[5] Feng, Z., Ling, J., Ming, M., & Xiao, X.H. (2017). Data-based Double-feedforward Controller Design for a Coupled Parallel Piezo Nanopositioning Stage. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 231(10), 881-892.
[6] Feng, Z., Ling, J., Ming, M., & Xiao, X.H. (2017). High-bandwidth and Flexible Tracking Control for Precision Motion with Application to a Piezo Nanopositioner. Review of Scientific Instruments, 88(8), 085107.
[7] 冯朝, 凌杰, 明敏, & 肖晓晖. (2018). 融合迭代学习与干扰观测器的压电微动平台精密运动控制. 机器人, (6), 825-834.
[8] Ling, J., Feng, Z., Chen, L., Zhu, Y., & Pan, Y. (2023). Neural network-based iterative learning control of a piezo-driven nanopositioning stage. Precision Engineering, 81, 112-123.
[9] Ling, J., Ye, T., Feng, Z., Zhu, Y., Li, Y., & Xiao, X.H (2022). A Survey on Synthesis of Compliant Constant force/torque Mechanisms. Mechanism and Machine Theory, 176, 104970.
[10] Ling, J., Chen, L., Feng, Z., & Zhu, Y. (2022). Development and test of a high speed pusher-type inchworm piezoelectric actuator with asymmetric driving and clamping configuration. Mechanism and Machine Theory, 176, 104997.
[11] Ren, Q., Zhu, W., Feng, Z., & Liang, W.Y. (2021). Learning-Based Force Control of a Surgical Robot for Tool-Soft Tissue Interaction. IEEE Robotics and Automation Letters, 6(4), 6345-6352.
[12] Qiu, C.C., Ling, J., Zhang, Y.K., Ming, M., Feng, Z., & Xiao, X.H. (2021). A Novel Cooperative Compensation Method to Compensate for Return Stroke of Stick-slip Piezoelectric Actuators. Mechanism and Machine Theory, 159, 104254.
[13] Ling, J., Feng, Z., Zheng, D., Yang, J., Yu, H., & Xiao, X.H. (2021). Robust Adaptive Motion Tracking of Piezoelectric Actuated Stages using Online Neural-network-based Sliding Mode Control. Mechanical Systems and Signal Processing, 150, 107235.
六、科研项目
在研项目:
[1] 国家自然科学基金青年科学基金项目,2025.01~2027.12,主持
[2] 湖北省自然科学基金计划青年项目,2024.07~2026.07,主持
[3] 广东省基础与应用基础研究基金省市联合基金项目,2023.11~2026.10,主持
[4] 武汉市知识创新专项项目-曙光计划,2023.06~2025.06,主持
已结题项目:
[1] 深圳市基础研究计划,2017.05~2019.05,项目骨干
[2] 新加坡科技研究局(A*STAR),2019.01~2020.03,项目骨干
[3] 澳门科学技术发展基金(FDCT)重大项目,2020.10~2022.10,参与
[4] 国家自然科学基金面上项目,2014.01~2017.12,项目骨干
七、著作、教材及专利等成果
[1] 冯朝,李瑞颉,陈万江,李嘉鹏,罗国相,肖晓晖. 迟滞特性正逆向模型建模方法、系统、设备及存储介质. (申请号:2024109736495)
[2] 冯朝,李嘉鹏,李帅刚,李瑞颉,陈万江,袁竞一,何宇航. 一种移动机器人行走结构、悬挂结构及移动机器人. (申请号:2024108475515)
[3] 冯朝,陈万江,李瑞颉,李嘉鹏,罗国相,肖晓晖. 一种具有二次位移放大功能的压电驱动器. (申请号:2024103573973)
[4] 凌杰,肖晓晖,叶婷婷,冯朝,明敏, 邱灿程. 一种连续两行程两级常力输出微夹钳及控制方法[P]. 湖北省:CN111843980B, 2022-01-14.
[5] 凌杰,肖晓晖,邱灿程, 冯朝, 明敏, 叶婷婷. 一种实现双向驱动的粘滑式压电驱动器及控制方法[P]. 湖北省:CN111711381B, 2021-10-22.
八、指导学生情况
[1] (2023.08)“申昊杯”第五届中国研究生机器人创新设计大赛·全国一等奖,叶谋景;罗国相;李帅刚;李子辰;李嘉鹏
[2] (2023.06) 武汉大学2023届优秀学士论文,刘轩硕
九、教学工作
本科生课程:
[1] 《测试技术》(主讲)
[2] 《智能传感与测试技术》(参讲)
[3] 《机器人学》(参讲)
研究生课程:
[1] 《机电智能控制》(参讲)
[2] 《工程测试与信号分析》(参讲)

武汉大学动力与机械学院

WHU青春永动机