
创造、创新、创业
Creation, innovation and Entrepreneurship
第六届研究生机器人创新设计大赛我校荣获佳绩
分类:院内新闻 作者: 来源: 时间:2024-10-28 访问量:
10月24日至25日,“申昊杯”第六届中国研究生机器人创新设计大赛全国总决赛开幕式在沈阳中国工业博物馆正式拉开帷幕。大赛由教育部学位管理与研究生教育司指导,中国学位与研究生教育学会、中国科协青少年科技中心主办。我校共有5支队伍入围总决赛,经过两天的激烈角逐,共夺得二等奖2项、三等奖3项,并获得“优秀组织奖”。
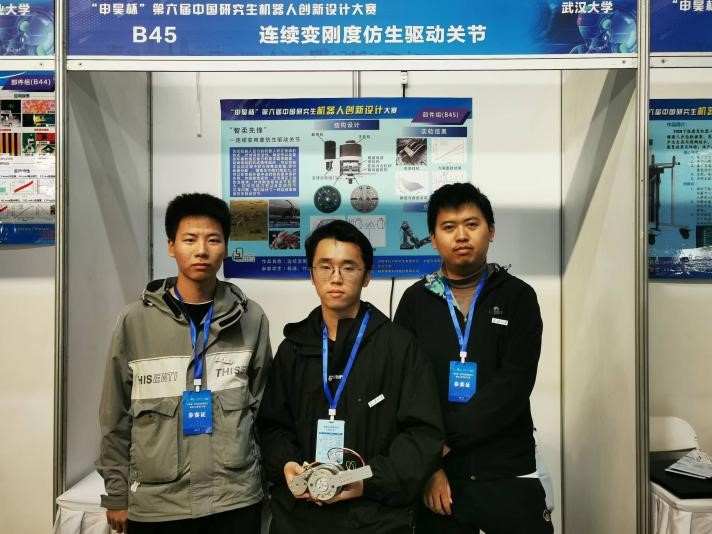
二等奖团队“智柔先锋”由杨潇、付志军、徐巍和许文航四位研究生组成,指导老师为郭朝。团队致力于仿生机器人的柔性关节驱动技术开发,研发出一种模仿动物肌肉储存和释放能量的连续变刚度仿生驱动关节,采用变动力杠杆原理,能够实现关节刚度在较大范围内的连续线性变化。该部件能显著提高机器人的交互安全性和环境适应能力,在服务机器人、仿生机器人和康复机器人等领域具有重大实用意义。
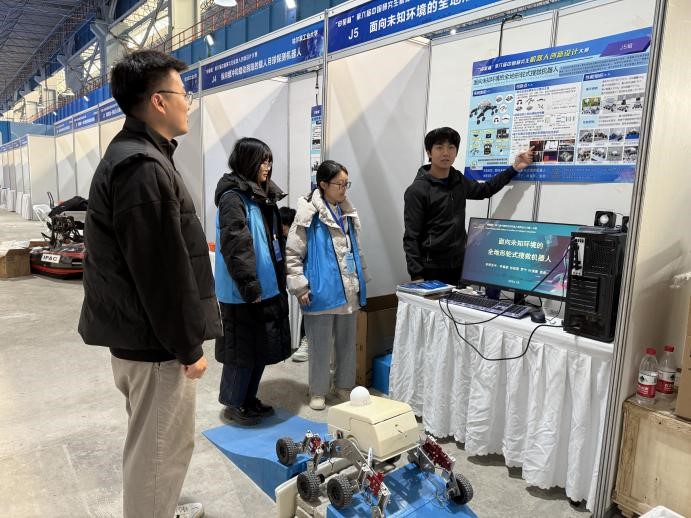
二等奖团队“Trailblazers”由李嘉鹏、徐丽雯、罗宁、叶谋景和袁竞一五位研究生组成,指导老师为冯朝、杨尚尚。团队致力于研发一种复杂地形适应能力强、能够探索未知环境、灵活性与负载能力兼备的轮式搜救机器人,能够在火场、废旧核电站、化工厂等复杂危险的重大事故现场中代替人进行搜寻和探测,有助于提升搜救效率,较少救援人员的伤亡。
三等奖团队“大东哥+小东哥”由柏炯、马钟波、柴翔、马东贺、张垚东五位研究生组成,指导教师为张志强。该团队致力于开发一套在狭窄空间环境下作业的火箭发动机封头段自动打磨装置,采用扫描建模技术、反馈式压力调节方法、并基于已有打磨理论进行材料去除。该机器人机械结构采用串联式混合自由度机械臂形式,可适应固体火箭发动机封头段的特殊形貌。该机器人在航空航天领域的应用,可加快固体火箭发动机的生产效率,大大减少绝热层打磨工序中的人工作业量,解决长久以来该领域的工作难题。

三等奖团队“搭载梦核心处理器的陈孟林帅队”由张梦飞、李帅刚、林元誉、陈星宇、苏建彰五位研究生组成,指导教师为肖晓晖,冯朝。该团队致力于在崎岖环境下无人摩托车的平衡控制和轨迹跟踪问题,基于深度强化学习和滑模算法进行智能化控制和跟踪。该机器人在山地、街道等狭窄空间内具备天然的作业优势。不仅可以应用于城市内的配送、代步、巡逻等自动化作业,还可以作用于国家安全领域,如未来战争、抗险救灾、野外巡逻、救援等智能化任务。

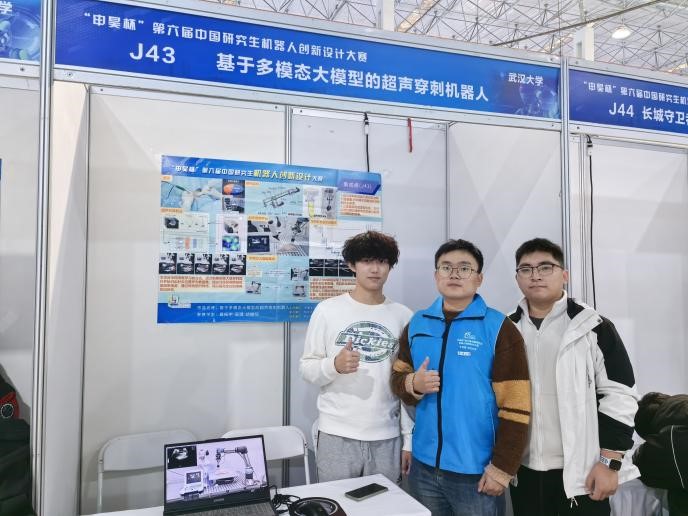
三等奖团队“UltraGo”由聂振宇,胡樾明,吴靖,何缘缘与周睿五位研究生组成,指导教师为李淼。该团队致力于解决超声穿刺过程中医生数量不足、穿刺二次伤害等问题,基于多模态大模型构建出智能双臂超声穿刺系统。该机器人可广泛应用于超声穿刺治疗过程,实现柔顺超声扫描与病灶定位,通过最短穿刺路径规划减少患者二次损伤,对促进医工融合起到积极的推动作用。
据悉,中国研究生机器人创新设计大赛以制造强国国家战略需求为导向,旨在培养机器人领域国家急需高水平科技创新人才,提升研究生的机器人创新设计能力,服务机器人产业生态体系建设,推动机器人科技与产业的创新发展。本次大赛共吸引来自全国186所研究生培养单位的1081支队伍报名参赛,最终93所高校和科研院所的326项作品入围总决赛,充分展现了全国高校在机器人创新设计研究领域的科研活力和创新能力。我校该竞赛的指导工作由党委研究生工作部牵头,动力与机械学院作为秘书处单位具体承办,积极组织动员、项目遴选、队伍培训、专家指导等,为赢得大赛奠定了良好的工作基础。
图文:刘今奇
审核:周迪一

武汉大学动力与机械学院

WHU青春永动机