
创造、创新、创业
Creation, innovation and Entrepreneurship
郭朝副教授在机器人领域顶级期刊《Soft Robotics》发表最新研究成果
分类:院内新闻 作者: 来源: 时间:2024-02-28 访问量:
近日,我院郭朝副教授课题组指导2019级本科毕业生林健锋同学在机器人领域顶级期刊《Soft Robotics》(IF=7.9),发表题为“Bio-inspired Bidirectional Stiffening Soft Actuators Enable Versatile and Robust Grasping”的变刚度软体机器人最新研究成果。
随着仿生学、材料学的发展,软体机器人应运而生。相对于传统刚性机器人的结构复杂、运动灵活性低、环境交互性差等缺点,软体机器人具有良好的柔顺性、运动灵活性和环境适应和交互能力。在医疗、探勘、可穿戴等领域越来越受到重视。
利用软体材料的柔顺性适应不规则或易碎物体的表面,简化了软体机械手抓取过程复杂的控制,具有广阔应用前景,然而软体机械手低刚度的特性限制了其抓取的负载能力和稳定性。针对这一问题,本研究通过学习人体手指的解剖学特征,提出一种双向可变刚度软体驱动器(BISA)(图1)。人在抓取过程中,可以通过肌肉的拮抗作用提升关节刚度;同时,指骨相互啮合的形状以及覆盖的结缔组织能够保证侧向的稳定性。基于上述两点解剖学特性,驱动器具有两种刚度调节机构,包括用于调节弯曲刚度的气动-肌腱混合驱动(ATA)和用于调节侧向刚度的类骨结构(BLS)。气动-肌腱混合驱动为驱动器的主要驱动弯曲的方式,同时能够通过拮抗作用调节弯曲刚度。承受侧向载荷的类骨结构如同人类手指中的指骨,在绳子的驱动下能进行弯曲。多节类骨结构通过绳子紧密连接,并包裹在气动-肌腱混合驱动器内,承受侧面载荷。在侧向刚度调制过程中,类骨结构不会对弯曲方向产生过大影响。

图1 双向可变刚度软体驱动器仿生设计与制作
实验表明,当弯曲角度为 45° 时,刚度调节范围约为三倍,最大刚度约为 0.7 N/mm。类骨结构则在不影响弯曲柔顺性的情况下,通过改变对结构的拉力进而改变侧向刚度。与不安装类骨机构的驱动器相比,侧向刚度有效提高3.9倍。同时类骨机构可以在不影响弯曲刚度的前提下,在一定范围内解耦调节侧向刚度。测试结果表明,刚性的类骨机构对弯曲柔顺性的影响很小。基于该驱动器具有的优秀性质,进一步提出了一种多功能通用软体机械手,能够实现跨尺度、跨重量和多模态的抓取任务(图2)。
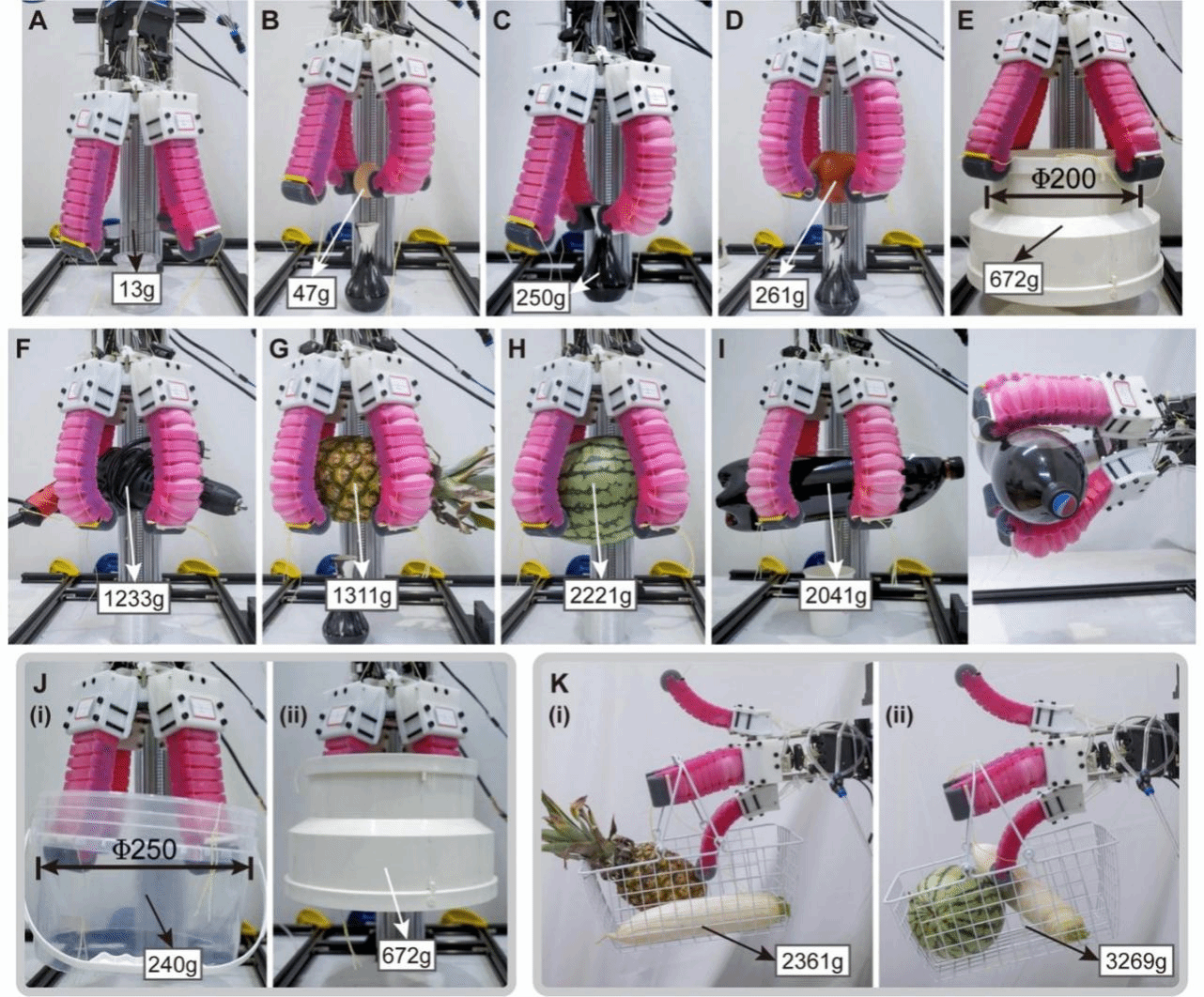
图2 软体机械手抓取操作与实验测试
武汉大学动力与机械学院机械工程系2019级本科毕业生林健锋为论文第一作者,该同学获全额奖学金赴美国佐治亚理工学院攻读博士学位,武汉大学为论文第一署名单位,郭朝副教授为论文通讯作者,柯景崴、肖瑞康、姜翔韬等本科生参与了部分研究工作。武汉大学训创中心提供了设备和场地支持。本研究得到了国家重点研发计划(2023YFE0202100)、国家自然科学基金青年基金项目(51605339)等课题的资助。
《Soft Robotics》是机器人领域的顶级期刊,影响因子在该领域仅次于《Science Robotics》,具有广泛的国际影响力。该期刊鼓励多学科交叉,涵盖了机械、力学、材料、控制等多个领域。

武汉大学动力与机械学院

WHU青春永动机