
创造、创新、创业
Creation, innovation and Entrepreneurship
机械系肖晓晖、郭朝课题组在康复机器人领域取得进展
分类:院内新闻 作者: 来源: 时间:2022-12-03 访问量:
随着我国人口老龄化的加速,脑卒中导致的偏瘫患者数量快速上升,患者年轻化趋势明显,多数患者存在运动功能障碍,给家庭和社会带来了巨大的负担。上肢康复外骨骼机器人(Exoskeleton)可用于恢复中风瘫痪患者的运动与生活能力,具有广泛的应用需求。作为应用于肢体康复的前沿研究技术,能够很好地弥补传统手动康复治疗方式的不足,但是外骨骼机器人技术走向应用仍然面临挑战,特别是其安全驱动与人机交互柔顺控制是其中急需突破的难点问题。
近日,武汉大学郭朝副教授与肖晓晖教授团队在机电领域顶级期刊之一IEEE/ASME Transactions on Mechatronics (TMech) 上发表了一篇关于上肢康复外骨骼机器人的研究论文。论文标题为 “CURER: A Lightweight Cable-driven Compliant Upper-limb Rehabilitation Exoskeleton Robot”。

图1 上肢柔性外骨骼机器人
现有的上肢康复外骨骼机器人普遍存在体积大、价格昂贵、刚性驱动、柔顺性不足等问题。本研究提出了一种基于套索人工肌肉驱动的轻型上肢康复外骨骼机器人,采用绳驱动方式将驱动电机和关节刚性连杆分开,减小了康复机械臂的质量和惯量,机械臂总重量仅有3.5Kg;设计了一种具有虚拟转动中心的六连杆机构,可模拟人体肩关节虚拟转轴,避免与人体头颈发生碰撞;研制了一种新型串联弹性驱动器(SEA),可以为关节提供高精度的柔顺力控制,在满足康复训练需求的同时,保证了用户穿戴的舒适性和安全性。

图2 主动助力模式中的位置跟踪控制
本研究还开发了多种机器人控制模式:主动助力模式、辅助助力模式以及阻抗模式,分别适用于患者上肢康复训练阶段中的急性期、恢复期以及保持期。开发了人机交互虚拟现实康复训练软件,设计的VR游戏可提高患者训练的积极性,并可以进行康复训练效果评估。目前团队与武汉大学中南医院、人民医院合作,正在开展康复机器人的临床应用研究,并与湖北省残疾人辅助器具资源中心合作,开展机器人的居家康复应用推广。
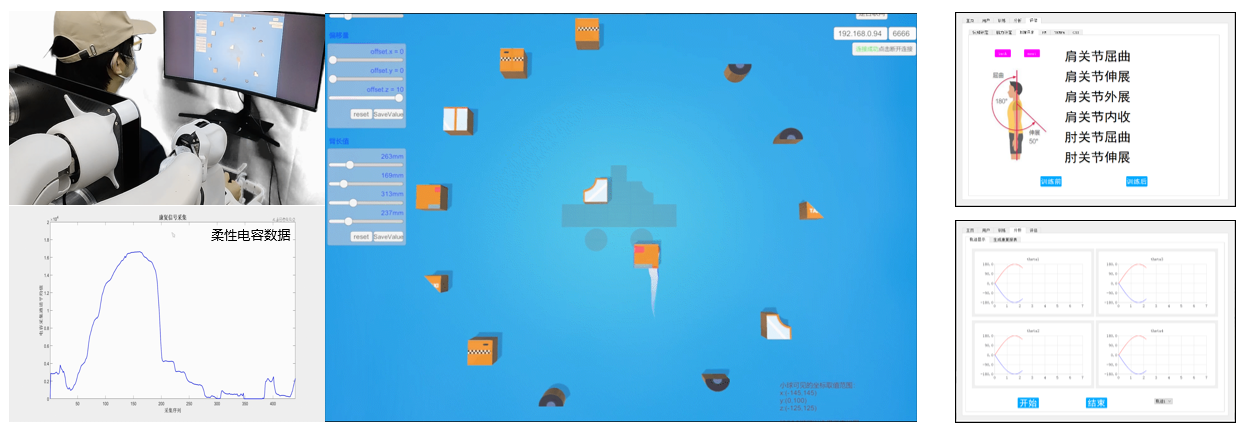
图3 VR游戏及后台数据界面
该论文由武汉大学独立完成。机械工程系2020级硕士研究生钱伟为论文第一作者,通讯作者为郭朝副教授,武汉大学为论文第一单位。该项目得到了国家自然科学基金青年基金项目(51605339)、中国残联残疾人辅助器具专项(2021CDPFAT-27)、湖北省重点研发计划(2020BAB133)、湖北省自然科学基金面上项(2017CFB496)等课题的资助。
论文链接:https://ieeexplore.ieee.org/document/9967017

武汉大学动力与机械学院

WHU青春永动机